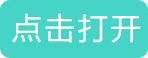
图:团队成员(中)演示人机协同动作\大公报记者于珈琳摄
【大公报讯】记者于珈琳渖阳报道:记者日前从东北大学获悉,该校机械工程与自动化学院教授陆志国及其学生共同研发一款双臂轮式仿人服务机器人,不仅实现不同空间信息交互,还首次实现国内轮式机器人前倾55度大角度俯身。操作者可通过VR设备获得机器人所在空间图像并做出判断及动作,异空间机器人将跟随完成动作。未来,该研发成果或将替代人类在高危劳动领域工作。
记者了解到,这款机器人可前倾55度大角度俯身,完成对地面物体拾取、放置等任务,代替人类处理事务。研发团队使用运动捕捉设备获取人的肢体运动数据,通过网络传输给机器人,送至机器人每一关节,实现人机肢体运动协同。
据研发团队介绍,因俯身动作易造成重心不稳,所以轮式机器人腰部一般不设计弯曲结构或仅设计较小角度俯身功能,限制机器人手部运动範围。因此该团队创新设计连杆滑块俯身结构,实现膝关节、髋关节联动,保证机器人整体稳定性。
研发团队在机器人和操作者两端安装语音採集和播放设备,借助网络传输,实现语音实时交互。同时,机器人身上装有双目摄像头,可採集环境信息,便於使用者结合环境信息做出判断。